
Intercept Ball Funktion
Intercept Ball Funktionsweise:
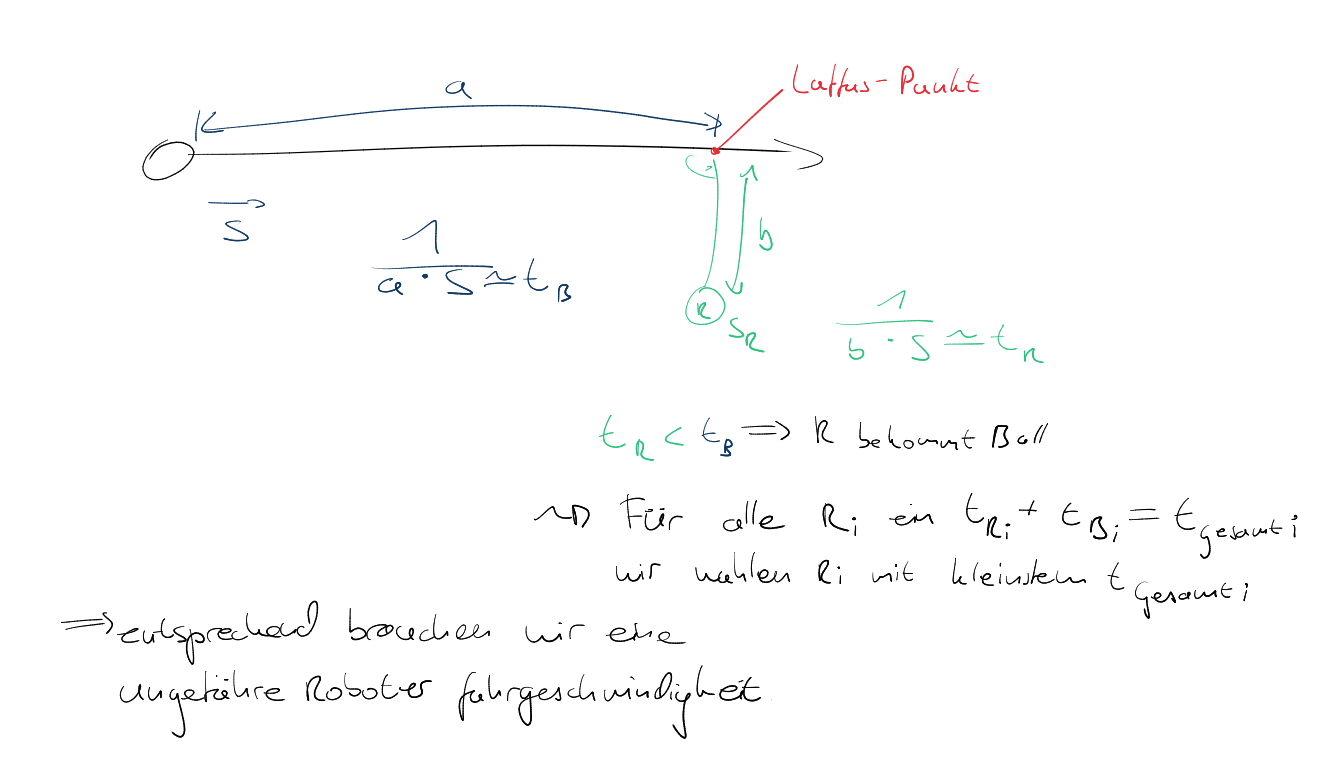
bei aktueller Geschwindigkeit und Richtung des Balls wird berechnet, wann dieser bei den jeweiligen Lotfuss-Punkten der Roboter ankäme. Diese haben auch jeweils ihre Zeit berechnet die sie bei Roboter-Beweggeschwindigkeit zu ihrem Lotfuss-Punkt bräuchten. Diese wird dann mit der Zeit des Balls dorthin verglichen, um zu schließen, ob der jeweilige Roboter überhaupt rechtzeitig bei der Ballposition ankäme.
Dann wird die Intercept "Rolle" an denjenigen Roboter vergeben, welcher die geringste kumulative Annahmezeit hätte. Dieser wird dann als Rückgabewert geliefert.
No Comments