
Encoder
Encoder, auch Incremental Encoder, sind relative Positionssensoren. Es muss ein absoluter Sensor verwendet werden, um die Initiale Position des Encoders zu bestimmen. Bei Motoren können dafür in den Motor integrierte Hall-Sensoren verwendet werden.
Der Encoder gibt erzeugt zwei Signale (A und B), die zur Bestimmung der Drehrichtung und position verwendet werden können. Manche Encoder haben ein zusätzliches Index signal, welches an einer bestimmten, absoluten Position des Sensors ausgelöst wird.
Die Signale A und B sehen wie folgt aus:
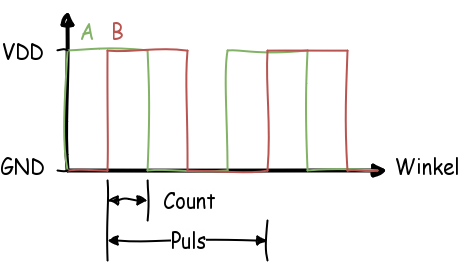
Die Signale A und B geben also versetzte Pulse. Die Drehrichtung kann dabei durch die Reihenfolge der Pulse ermittelt werden. Kommt der A-Puls vor dem B-Puls, dreht der Encoder in Positive Richtung. Kommt der B-Puls jedoch vor dem A-Puls, dreht der Encoder in entgegensetzte Richtung.
Über die Anzahl der Pulse lässt sich die Position des Encoders relativ zum Startpunkt bestimmen. Dabei können entweder die Pulse, oder die Signaländerungen, auch Counts genannt, gezählt werden. Das zählen der Counts erhöht dabei die Auflösung, da es pro Puls vier Counts gibt. Die Pulse oder Counts können mit Hilfe der Pulse Per Revolution (PPR) beziehungsweise Counts Per Revolution (CPR) in einen Winkel umgewandelt werden. Mindestens einer der werte PPR und CPR ist im Datenblatt des Encoders angegeben und kann in den jeweils anderen Wert umgewandelt werden.